

NASA のジェット推進研究所 (JPL) の科学者は、将来の宇宙遠征に向けてモビリティ システムと自律性人工知能を改善するために、ERNEST (極端な傾斜地を移動するための探査ローバー) プロトタイプを砂漠の試験で使用しています。
北米宇宙機関はJPLを通じて、自動運転車の新型モデルであるERNESTのテストにおける大幅な進歩を明らかにした。最新の評価は、困難な地形の克服に焦点を当てて、米国のコロラド砂漠で実施されました。
実験車両は 37 時間の運転で約 26 キロメートルを走行し、1 週間にわたる評価を実施しました。その目的は、月の南極のような照明が困難な領域を含む、他の天体のアクセスが困難な領域を効果的に探索できる、より優れた自律性と速度を備えた装置を構築することです。
並行して、NASAは2034年に予定されているドラゴンフライミッションの開発を進めており、土星最大の衛星であるタイタンに航空機を送り込むことになる。この遠征の目的は、遠隔の空間環境でその表面の化学組成と有機層を研究することです。
ロボット宇宙探査における大きな進歩
ERNEST は Exploration Rover for Navigating Extreme Sloped Terrain の略で、将来の月への旅行をテストするためのプラットフォームとして機能します。その構造は、他の惑星や衛星の過酷な条件を再現する地球シナリオでの厳密な検査を受けています。
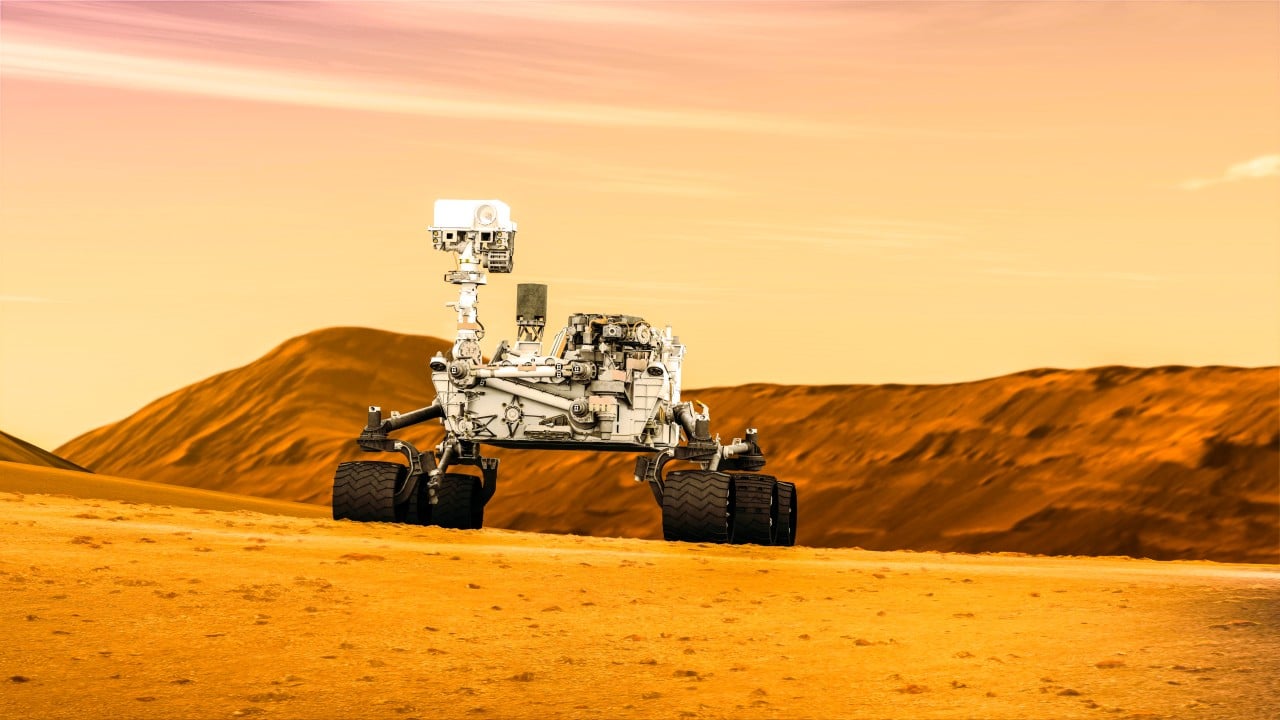
コロラド州の砂漠で行われたテストでは、プロトタイプは不規則な表面上を移動する際に驚くべき器用さを示し、現在火星にいる探査車「キュリオシティ」や「パーサヴィアランス」よりも速い速度に達した。この結果は、ロボットミッションの視野を広げる根本的な進歩とみられています。
JPLの主任技術者で実験のリーダーであるイッサ・ネスナス氏は、目標はシステムの可動性と自律性を最適化することであると強調した。チームからの情報によると、同氏は次のように述べている。「これらのテストは、月面で予想されるさまざまな照明条件下で、広範囲の地形上で、極端な距離を移動できるように、移動ハードウェアと自律性ソフトウェアを改良するのに役立ちます。」

2026 年 3 月、南カリフォルニアのコロラド砂漠でのフィールド段階で、JPL チームは 1 日のさまざまな時間に ERNEST を実施しました。これには、夜明け、夕暮れ、夜間、つまり細長い影が月の環境を再現する時間帯の操作が含まれます。
これらのシステムの改善は、火星で運用されている探査車ですでに目に見えています。たとえば、パーサヴィアランスは、ほとんどのルートを自律的に実行し、移動の安全性を確保するために継続的なチェックを実行します。この能力により、より高い作業効率で長距離をカバーすることが可能になります。
一方、NASAは他の天体へのロボット技術の応用をさらに拡大するつもりだ。ドラゴンフライのミッションは、メタン川や湖で有名な土星の衛星タイタンを探索する予定だが、地球との接触がない期間が長いため、その決定には高度な自主性が必要となる。
ジョンズ・ホプキンス大学応用物理研究所の研究者であり、このミッションの主責任者であるジビ・タートル氏によると、この事業は主に生命の直接検出に焦点を当てたものではないという。その代わりに、その目標は、地球上の生物学的発達に先立つ化学プロセスを調査することです。
タイタンでは、飛行体は新しい地点に移動する前に、各研究サイトで地球時間で最大 16 日を過ごします。このミッションは、生命の存在に適した条件を提示しているため関心を集める別の衛星であるエンケラドゥスなど、太陽系の他の領域の研究に貴重なデータを提供する可能性を秘めています。